采用 DJI Terra 軟件解算前期采集的激光雷達掃描數據,輸出原始點云數據,采用 LIDAR360、點云智繪軟件對 DJI Terra 生成的點云數據進行點云去噪、點云分類、點云編輯、點云重采樣等步驟,生成符合要求的雷達點云數據。
(1) 平面中誤差和航帶拼接平面中誤差優于平均點云間隔;平地高程中誤差和航帶點云接邊限差優于 0.35 米,丘陵地高程中誤差和航帶點云接邊限差優
于 0.85 米,山地高程中誤差和航帶點云接邊限差優于 1.75 米;粗差率≤5%。
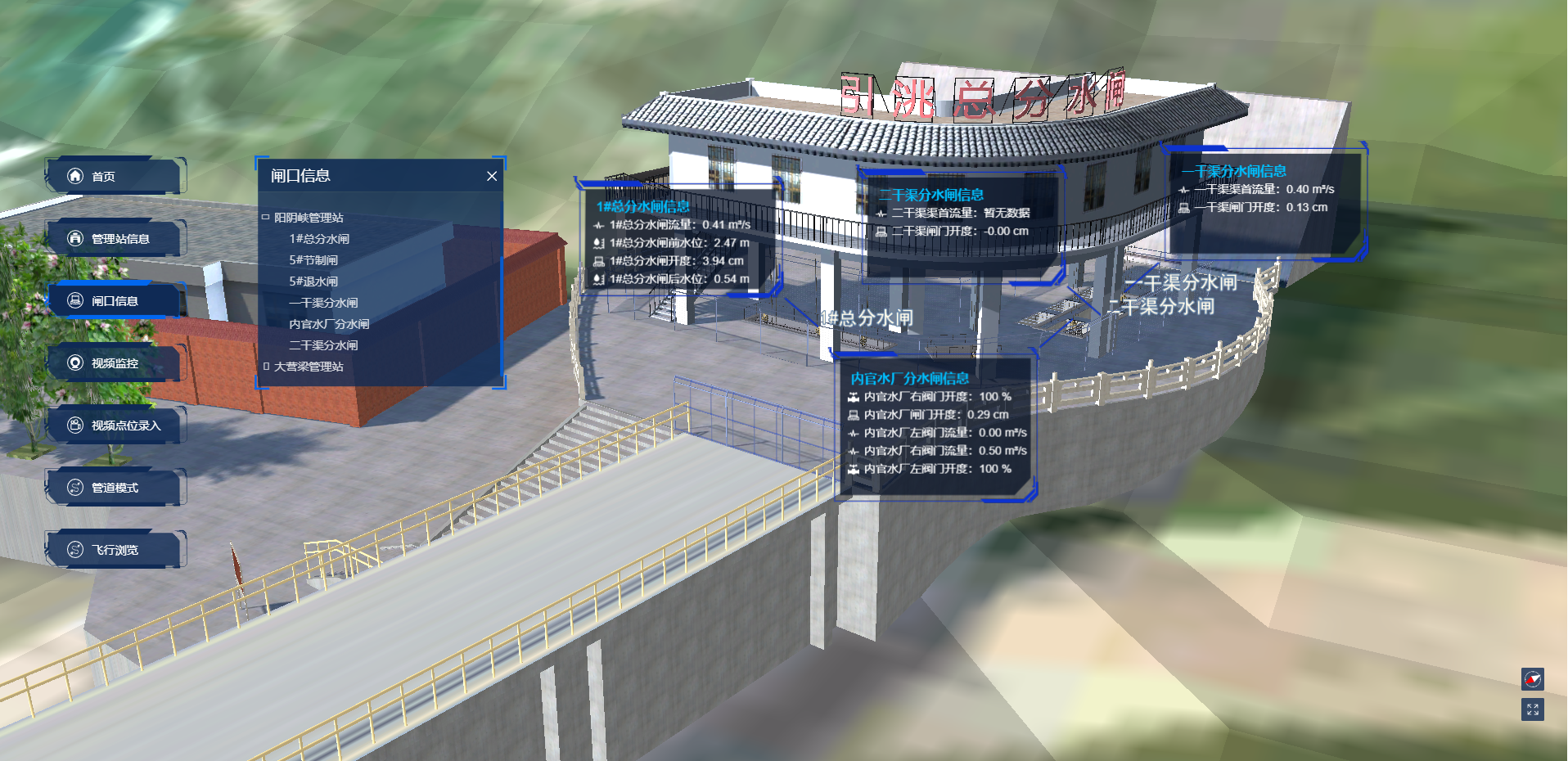
(2) 數據坐標必須與給定的坐標保持一致,點云模型數據必須與傾斜攝影模型保持一致,準確反映現狀。
(3) 數據格式采用 LAS 格式。
采用 DJI Terra 軟件進行激光點云的解算工作。首先新建激光雷達點云處理任務,然后導入激光雷達源文件,設置相應參數后開始重建,最后輸出 las 格式的點云數據。
將解算后的點云數據加載到 LIDAR360 軟件中,利用去噪工具去除點云中的高位粗差和低位粗差,提高點云數據質量。
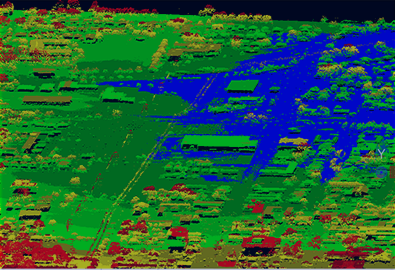
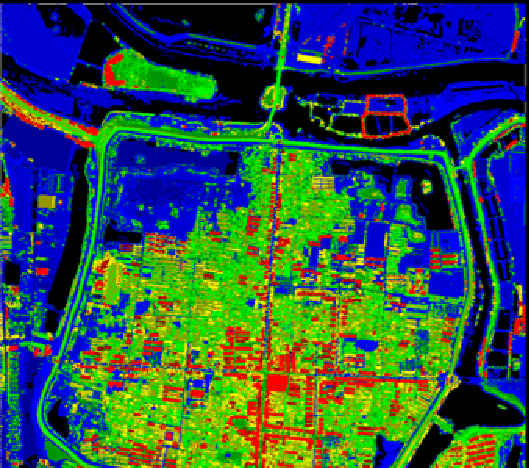
對去噪后的點云數據進行分類,將點云中的地面點和建筑物點劃分入相應類別。
a. 地面點分類
利用地面點分類工具,根據測區實際情況對最大建筑物尺寸、最大地形坡度等參數進行設置,迭代角度一般設置為 10°至 30°,迭代距離一般設置為 1 至 2 米,地形起伏較大時,迭代角度和迭代距離可適當同步調大。
b. 建筑物分類
利用建筑物分類工具,根據測區實際情況對鄰域半徑、距離閾值等參數進行設置,鄰域半徑一般設置為點間距的 4 至 6 倍,距離閾值一般設置為略大于點間距。

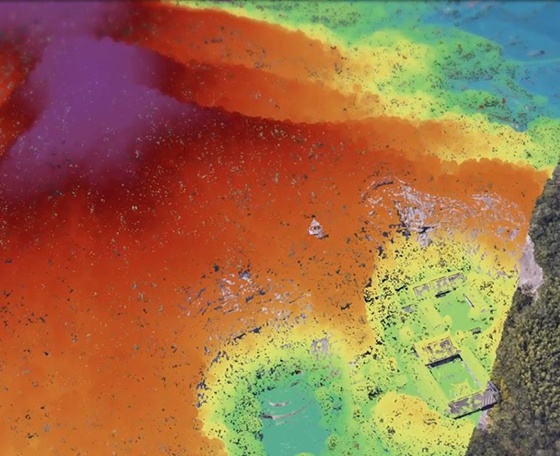
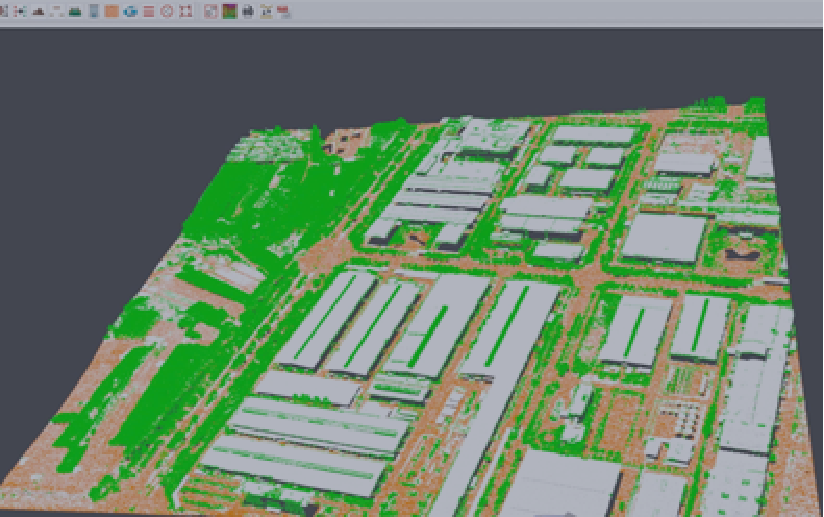
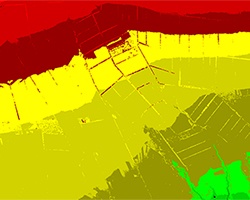
因自動分類算法的準確度很難達到百分之百,通過人機交互式編輯分類將錯誤分類和漏分類的點云數據分到指定類別,將建筑物墻面點分到未分類點。
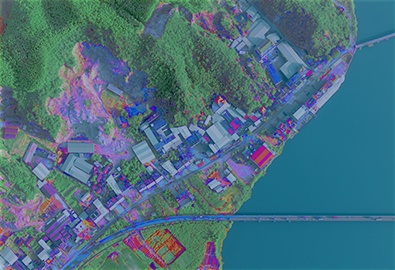
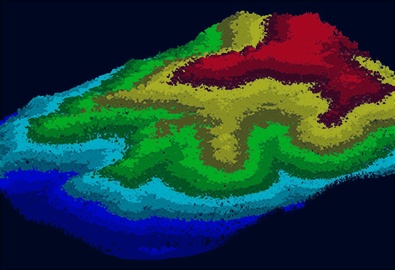
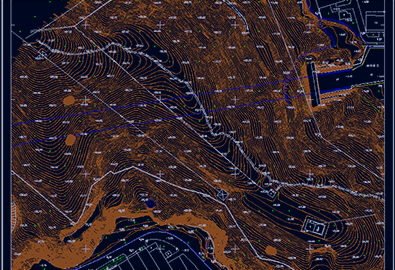
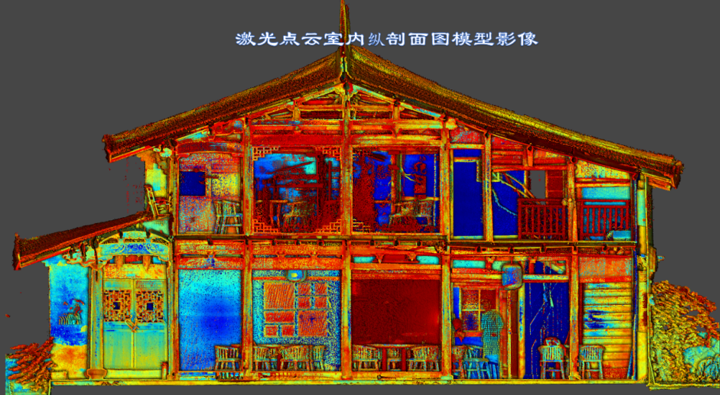
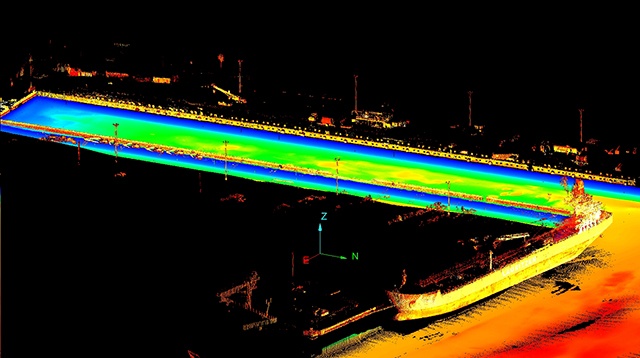
圖 5.6-6 點云編輯
利用按類別提取工具,從點云中提取需要的地面地、建筑物點,保存成單獨的文件。
利用重采樣工具,采用最小點間距的采樣方法,對按類別提取后的點云數據進行重采樣,在滿足點云密度要求的前提下減少點云數量。
完成重采樣的激光點云數據成果需經過質量檢查合格后才可整理提交。根據(二) 中各項要求并套合傾斜攝影模型對點云數據進行檢查,保證點云數據的質量。
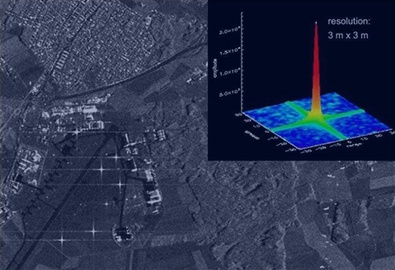
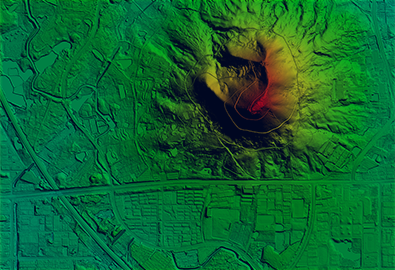
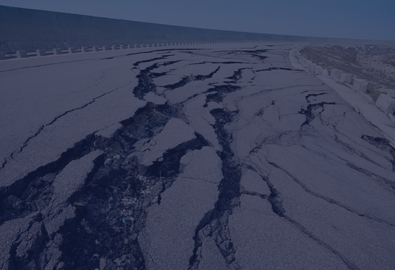
機載LiDAR可快速獲取高精度、高密度的地表三維坐標信息數據。這些數據是一系列空間分布不均勻的離散點云數據,如何對這些數據進行濾波是當前國內外研究的熱點,現有濾波算法大多都是基于...
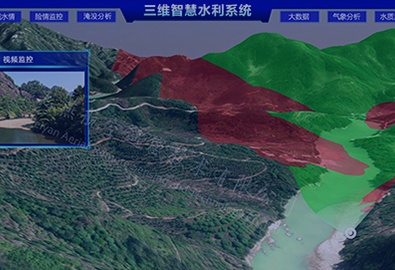
公司具備PB級處理能力,通過自主研發了P3C、ImgTools、CloudTools等軟件,將海量多源數...

南京師范大學隨園校區承載著厚重悠遠的百年文脈,浸潤著“東方最美校園”的靈秀之氣。...

飛燕遙感承接了近萬平方公里的點云及影像數據采集的新能源測圖項目并順利驗收。項目通...

近日,湖北省經信廳發布《2022年度湖北省創新產品應用示范推薦目錄》(以下簡稱《目錄...
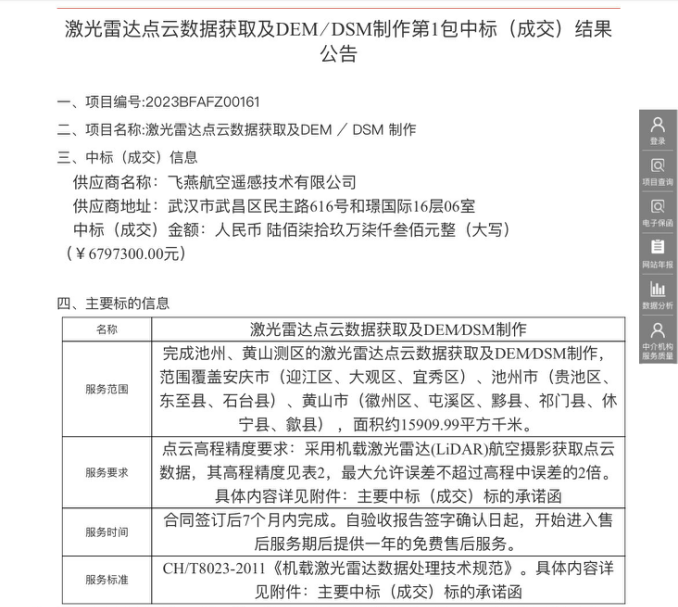
近日,飛燕遙感喜中2023年安徽省機載激光雷達點云項目,中標金額6,797,300元。 此次...
電話:025-83216189
郵箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力資源)
地址:江蘇省南京市玄武區紅山街道領智路56號星河World產業園3號樓北8樓

微信公眾號

總經理微信
版權所有:飛燕航空遙感技術有限公司 ? 2019-2025 備案號:鄂ICP備19029994號-1 蘇ICP備20022669號-1  鄂公網安備:420106020021194號
鄂公網安備:420106020021194號  簡體中文/English
簡體中文/English